1/35 マーシィドッグ 完成 [1/35 マーシィドッグ]
やっとこ完成^^!

上半身はファントムグレーベース、下半身はマホガニーベース立ち上げ
写真じゃ全くわかんないけど...
汚しとか錆の手間を省いたのね。ABSのパーツとか使ってるのでエナメルでの
クラックが入るのを恐れたのね。いや、手抜きじゃないです(ホント?)

疑似コックピット、無理やり降着、頑張って作ったかいはありました。
忘れちゃいけない今回の目標、腰を落として両手で銃を構える・・・
うーん、どうでしょう^^;
時間はかかったけどそれなりに満足いくものはできたということで
終了!
1/35 マーシィドッグ 11 [1/35 マーシィドッグ]
基本工作ほぼ完了

な、長かった・・・
サボってたせいで(笑)
気になるところはまだあるけれど、いい加減完成させたいのでこれで打ち止め。
下地処理に入りまーす。
1/35 マーシィドッグ 10 [1/35 マーシィドッグ]
バックパック: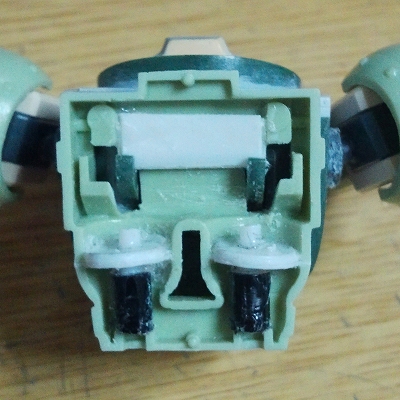
胴体幅詰めに合わせてフックの取り付け位置を修正。
パイプ取付け部にポリキャップ(PC-02より)を内蔵。
脹脛も同様にPC-02と同プラサポ①より取付け部を内蔵。
パイプ:
PC-02プラサポ①よりピン型のパーツに2.0mm
パイプスプリング、軸にテクノロート1.1mm(プラの針金)。
これにモビルパイプ3.5を被せてゆく。
テクノロートは接着できないので、ピン型パーツとパイプスプリングで
挟み込んで瞬着で固定する。
もう一組降着状態専用のパイプを作る予定。
1/35 マーシィドッグ 9 [1/35 マーシィドッグ]
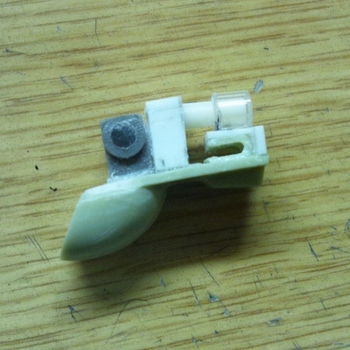
胴体②~頭部


内装パーツをプラ板で自作。側頭部のパーツにハッチへの取り付けピンを設ける。
ABSの市販パーツから改造。ピン2本で挟み込んで固定する。
ハッチの取り付け
真鍮線と2mmプラ棒によるシンプルな構造。

何とか形にはなってます^^;
1/35 マーシィドッグ 8 [1/35 マーシィドッグ]

キットのパーツをシート状にカット。ストライクドッグの
シート上半分と操縦桿を移植(モッタイナーイ)

移植した操縦桿に合わせてキリコの腕を肘でカット。
角度を変えて再接着。指も角度を変えている。

内装もストライクのパーツを改造して移植。

キットのまんまよりはいいでしょ^^

蓋をかぶせた状態。首周りはシートを収める関係で
取り付け溝をカット。可能な限り削り込んでいる。
1/35 マーシィドッグ 7 [1/35 マーシィドッグ]

下腕:手首部分にBJ-04のパーツを加工して挟む。サイズぴったり^^

肘パーツはF2ザクより加工。先端にメンタムを塗っておく。
下腕にエポパテを詰めて型押し。

可動範囲はこんな感じ。まあ十分かな。
1/35 マーシィドッグ 6 [1/35 マーシィドッグ]
腕部①
やはりF2から移植。キットのパーツは上部は肩パーツが入るように
穴をひろげ、下部は肘パーツと挟む為カット。
肩アーマーは関節技で肩上部で接続。
頭部①
ハッチはプラ板(0.5mmx3)で自作。キットの首パーツは
ハッチの形状に合わせて削る。
1/35 マーシィドッグ 5 [1/35 マーシィドッグ]
さらに脚部①つづき
太腿~脹脛

股関節は関節技に置き換え。太腿は接着面で1mm増、5mm延長
膝関節はABSユニットWジョイント
脹脛
降着機構を再現する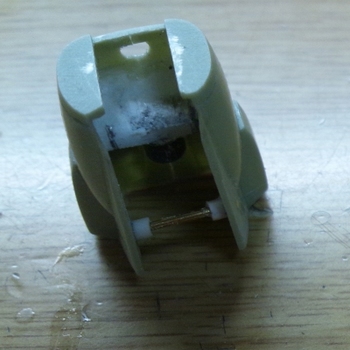
足首アーマーの取り付け部分を利用してスライド関節を作る
わずかに出っ張った部分を足首関節の土台に引っ掛けるようにして
前面に倒れない為のストッパーとする。
スライド部分はテーパーがかかっているので上方向には外れない。


1/35 マーシィドッグ 4 [1/35 マーシィドッグ]

足首アーマーの取り付け
PC02と同系のプラサポを使い2mmプラ棒でつなぐ

あとは現物すり合わせで干渉する部分を排除しまくる!

脹脛に取り付けの土台を作る。
まずノコで切れ目を入れ、0.3mmプラ板を挟む。

プラ板の切れ端やアルテコパテの粉を瞬着で固めてガッチリ補強。
取り付け部はプラサポで


やはりアーマーのある分、前傾での可動には若干影響があるが
それ以外での自由度は確保できている。
1/35 マーシィドッグ 3 [1/35 マーシィドッグ]
胴体①さらにつづき~脚部①

F2ザクの股関節を無理矢理移植。もちろんスイング機構もそのまま。
足首

接着面で2mm幅つめ。関節部はカット。
F2の関節パーツを改造。接続部はPC03のポリキャップに交換。
同系のプラサポと組み合わせて接続する。
いいんじゃない^^



